Säsongssammanfattning:
2017-03-04: Holken sattes upp
2017-03-08: Första besöket!
2017-04-01: Det första bomaterialet börjar tas in efter mer än 120 besök
2017-04-11: Den första övernattningen!
2017-04-21: Första synliga ägget men det är kanske fler
2017-04-24: Tre synliga ägg
2017-04-25: Fyra ägg och honan blir matad i holken
2017-04-26: Fem ägg
2017-04-30: Nio ägg. Nu är det nog snart dags att börja ruva på riktigt!
2017-05-01: Nu har jag spelat in drygt 6800 videosnuttar som upptar 10.5 GB på serverns hårddisk
2017-05-02: Nu ruvas det på riktigt! Honan har varit i holken större delen av dagen.
2017-05-06: Snart har halva ruvningstiden gått
2017-05-15: Första ägget kläcks
2017-05-16: Alla ägg utom ett är kläckta
2017-05-21: Det är 7 eller 8 ungar som krälar runt och äter, sover, äter… Nu börjar också de första fjädrarna synas
2017-05-29: Nu är det 4 bara ungar kvar. Övriga har dukat under och blivit utkastade ur holken av föräldrarna
2017-05-31: Tyvärr har mamma blåmes och 3 ytterligare ungar dött i holken och det är bara en unge kvar som får mat av pappa blåmes. Jag publicerar inga videos på detta eller resten av säsongen då holkens innandöme inte är särskilt trevligt.
2017-06-03: Den unge som fått mat av pappa blåmes sitter i holk-öppningen ett bra tag innan den bestämmer sig för att flyga ut men till slut så vågar den. Nu är det bara döda fåglar och flugor kvar i holken…
HolkCam2 är därmed avslutat och nu är det bara att ta ner holken och rensa den eller slänga den.
Videofilerna finns kvar ett tag men avslutningen blev ju inte så trevlig i år heller så jag får se vad jag ska göra med materialet.
Mer spännande information om blåmesar finns på Wikipedia.
Säsongens höjdpunkter hittills på YouTube
All kod för kamera och server-backend finns på mitt github-konto.
Nedtagning och avslutning
Nedan är bilder när holken tömdes. Det var en rejäl bobale detta år, ca dubbelt så hög som förra året men djupet i holken var också större för att undvika skatattacker.
Kamera modulen, en raspberry pi 3 och en Arducam IR kamera med riktigt vidvinkelobjektiv ska jag återanvända. Jag rengjorde den och försökte torka av den med handdesinfektion men har också knutit in den i en plastpåse och lagt den i frysen några dygn så eventuella bakterier ska försvinna.
Själva holken kanske jag också använder igen då den har ganska bra mått och är målad som vår husfasad.

Holken när taket tagits av

Den höga bobalen. Hålet nederkant är i samma höjd som undersidan på ’ribborna’. Hålets diametar var 28mm.

Bobalen med den döda blåmesmamman och några döda ungar.
Bygget av holken, projektbeskrivning:
Steg 1 Trä-hårdvaran
 Det började med att jag köpte lite prylar från ebay, en kameramodul med skruvfäste för riktiga objektiv och ett medföljande fish-eye objektiv. Jag ska prova det lite och så får vi se vad som händer.
Det började med att jag köpte lite prylar från ebay, en kameramodul med skruvfäste för riktiga objektiv och ett medföljande fish-eye objektiv. Jag ska prova det lite och så får vi se vad som händer.
Leveransen av kameramodulen drog ut lite på tiden och då började jag med själva holken. Ett mindre ingångshål, djupare och med inbyggt skatskydd blir den säkrare. Holken har även ett ’innertak’ precis ovanför ingångshålet så det blir ett litet ’maskinrum’ där kameran etc kan placeras. Till vänster syns delarna innan dom skruvades ihop.
Förutom kamera kommer holken att ha IR-belysning och någon form av temperaturgivare. Kanske kan jag även får plats med en andra kamera dvs ha både en IR-och en vanlig kamera.
Nedan är en bild när holken är hopmonterad men utan tak.

Steg 2 Val av hårdvara
Nu har jag valt en kameramodul med lagom mycket vidvinkel, (NoIR Camera Board OV5647 /w M12x0.5) och provat lite hur den ska få plats i holkens ’maskinrum’. Jag skulle även vilja ha en mikrofon och kanske någon mer givare förutom temperatur. Det vore kul att sätta upp en lysdiod eller motsvarande på holken som visar när någon är ’hemma’ tex. Hårdvaran för övrigt blir nog en raspberry pi 3 och ett stort minneskort.

Den utvalda hårdvaran. En raspberry pi 3 och IR-kameran kompletterade med en temperatur och luftfuktighetssensor och några IR-lysdioder. Ev tillkommer en vanlig röd lysdiod som ska sitta på utsidan för att visa om det är någon i holken.
Steg 3 Programvarutest
Nu ska jag prova programvaran där jag denna gång använder python och opencv samt en egen implementation för att detektera rörelser och spara videosnuttarna. Jag ska också automatisera hur jag sparar och publicerar klippen på en websida. Som tidigare kommer en videoström alltid att vara tillgänglig för att se ’live’ vad som händer i holken.
Steg 4 Färdigt koncept för hårdvaran
Nu har jag ett koncept på hur det hela ska monteras i holken.
Programvaran börjar också ta form och jag checkade just in en version av en opencv-genererad bildström som får en uppdateringsfrekvens på ca 5 när jag kör 1024×768 vilket är en rejäl förbättring mot tidigare. Det är också väldigt mycket bättre bildkvalitet och lättare att styra överlägg (tex text) i bildströmmen.
Kameran är monterad på rätt sätt och en temp/fuktighets-sensor finns på plats för montering i holken.
Steg 5 IR-belysning
Nu har jag en fungerande ljusramp av IR-dioder också där det går att styra ljusstyrkan mha en pwm-signal. Programvaran kan nu också spara videosekvenser och jag håller på att programmera rörelsedetekteringen så snart blir det skarpa tester.

En stillbild från videoströmmen. Det är tvärmörkt i holken men ir-dioderna lyser upp ganska bra även med 50% pwm. Texten visar tid, temperatur, luftfuktighet och bilder per sekund. Då det är ett fish-eye objektiv ser holken väldigt djup ut. Jag har ett objektiv till som inte är lika vidvinkligt så jag ska prova med det också och se vilket som funkar bäst.
Steg 6 Kameramodulen
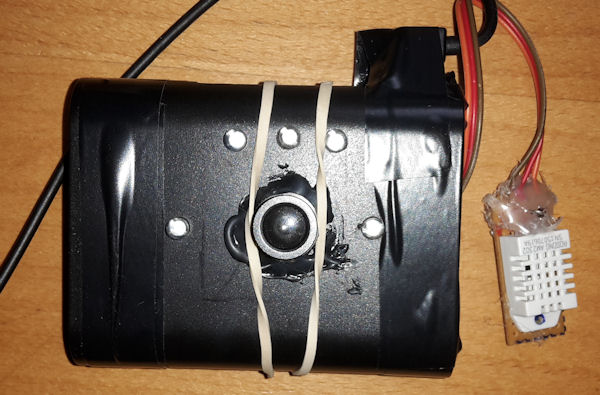
Nu har jag en fungerande hårdvara! Allt monterat i en lite låda för raspberry-pi med kamera och IR dioder som tittar ut genom locket. Jag bytte ljusrampen mot fastmonterade dioder som jag tror funkar bättre.
Smältlim, gummiband och eltejp håller ihop det just nu. Nu fattas ’bara’ programmet som ska fixa rörelsedetektorn och videoinspelningen men det är på g. Sedan gäller det att hitta en bra plats att sätta upp holken på. Just nu lutar det åt att jag helt enkelt skruvar upp den på väggen utanför fönstret på övervåningen. Då blir det lätt att dra ut en strömsladd och även göra ’service’ om det skulle behövas.
Jag ska även göra en bättre ’backend’ än förra året då det är tänkt att videofilerna ska synkas till min egna webserver.
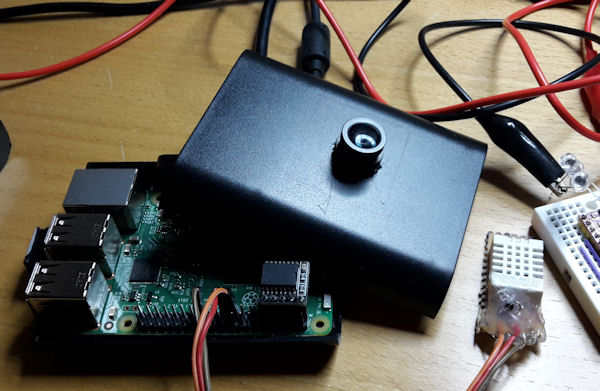
Raspberry-pi lådan med kamera och ir-belysning. Det vita är en temperatur och luftfuktighets sensor som ska sitta i holken.
Steg 7 Rörelsedetektor
Projektet tog ett rejält kliv framåt i helgen då det var ’Minihack. Jag fick hjälp av en jobbarkompis och vi snodde ihop en rörelsedetektering i mjukvaran med hjälp av opencvs ’backgroundsubtraction’.
Nu fungerar även inspelningsfunktionen och det finns två rörelsedetektorer. Förutom direkt i videoströmmen har jag även installerat en ’PIR’ detektor men den verkar falsklarma lite för ofta så kanske behövs det någon justering…
Steg 8 Sista touchen
Nu är den snart klart att sättas upp. Förutom att ’backend’ och övriga programvaran är klar (eller åtminstone tillräckligt klar) har jag även satt fast tätningslister runt taket och bättrings målat holken lite. Nästa steg blir att sätta upp den och det kommer jag att göra till helgen. Sen är det bara att hoppas på att blåmesarna gillar även denna nya generation av holk.
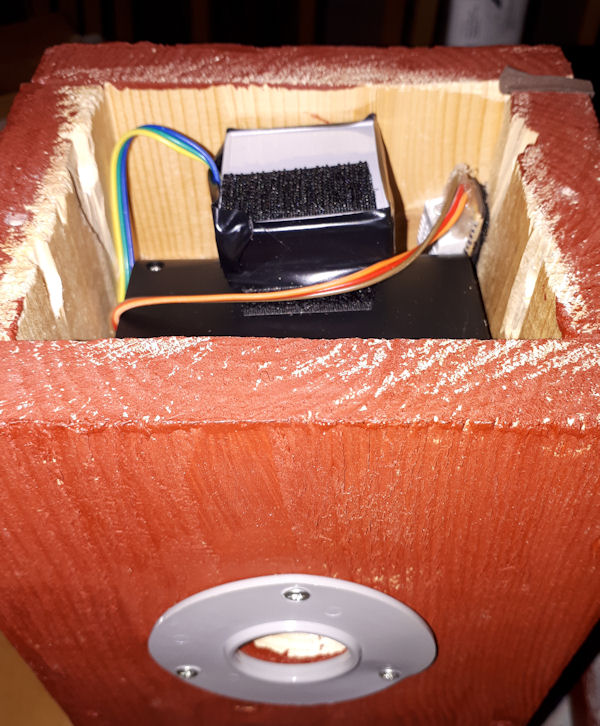
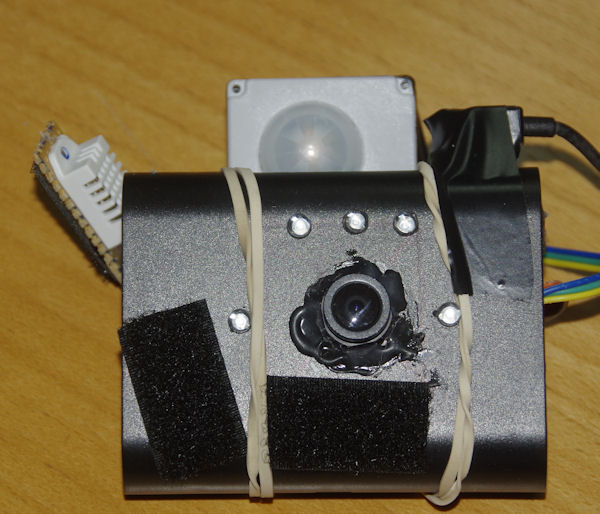
Kameran monterad under taket och temperatursensorn på sidan i bakre hörnet.

Tätningslisten. Taket skruvas fast mot denna så då blir det förhoppningsvis tillräckligt tätt.
Steg 9: Uppsättning och start
Nu är den uppsatt och startad på riktigt. Följ utvecklingen via http://sundback.ddns.net/

Holken uppsatt på samma ställe som förra året, dvs på en av stolparna till våran trappavsats.



 I går fick jag ett litet vadderat kuvert igen. Denna gång innehöll det 5 uppsättningar av RF sändare och mottagare som jag var tvungen att prova. Jag hittade lite exempel kod för Aurdino och var snart redo att tända en lysdiod via en radiolänk. Rätt coolt i all sin enkelhet… Jag kopplade sändaren till en raspberry pi och mottagaren till en Aurdino. Rasberryn talade sedan om via radolänken när dioden skulle tändas och Aurdinon utförde ordern.
I går fick jag ett litet vadderat kuvert igen. Denna gång innehöll det 5 uppsättningar av RF sändare och mottagare som jag var tvungen att prova. Jag hittade lite exempel kod för Aurdino och var snart redo att tända en lysdiod via en radiolänk. Rätt coolt i all sin enkelhet… Jag kopplade sändaren till en raspberry pi och mottagaren till en Aurdino. Rasberryn talade sedan om via radolänken när dioden skulle tändas och Aurdinon utförde ordern.











Senaste kommentarer